
FIXical I/O ー
Dexterous finger movements are critical for both everyday and specialized tasks. However, acquiring such skills is challenging, as it requires accurate sequence memory and fine finger coordination. Existing haptic training systems typically employ demonstration feedback, which physically guides correct movements, or post-error correction, which intervenes after errors occur. While effective, these approaches can reduce learners’ autonomy or expose novices to repeated errors, which can harm motivation.
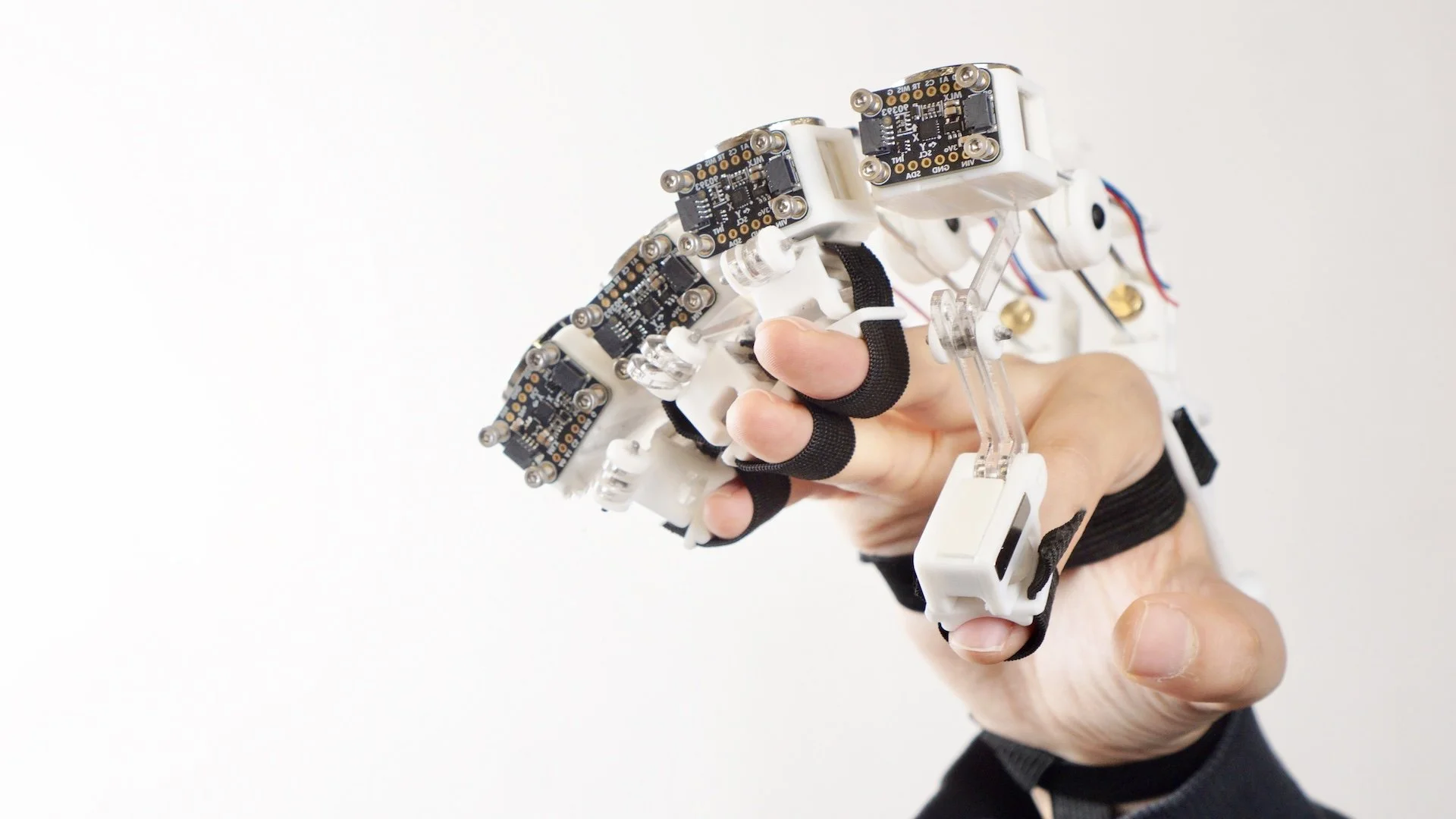
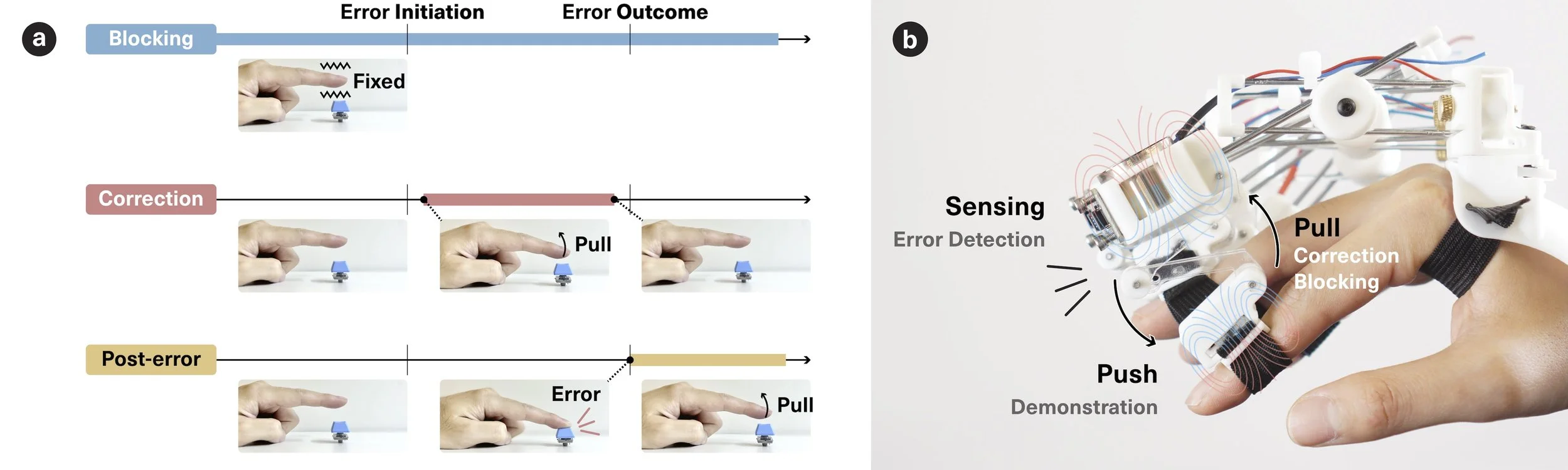
We introduce FIXical I/O, a magnetic hand exoskeleton that enables three error feedback strategies by combining real-time motion sensing with electromagnet-based actuation: Preemptive Error Correction (nudging fingers away from incorrect actions), Preemptive Error Blocking (constraining erroneous movements before execution), and Post-Error Correction.
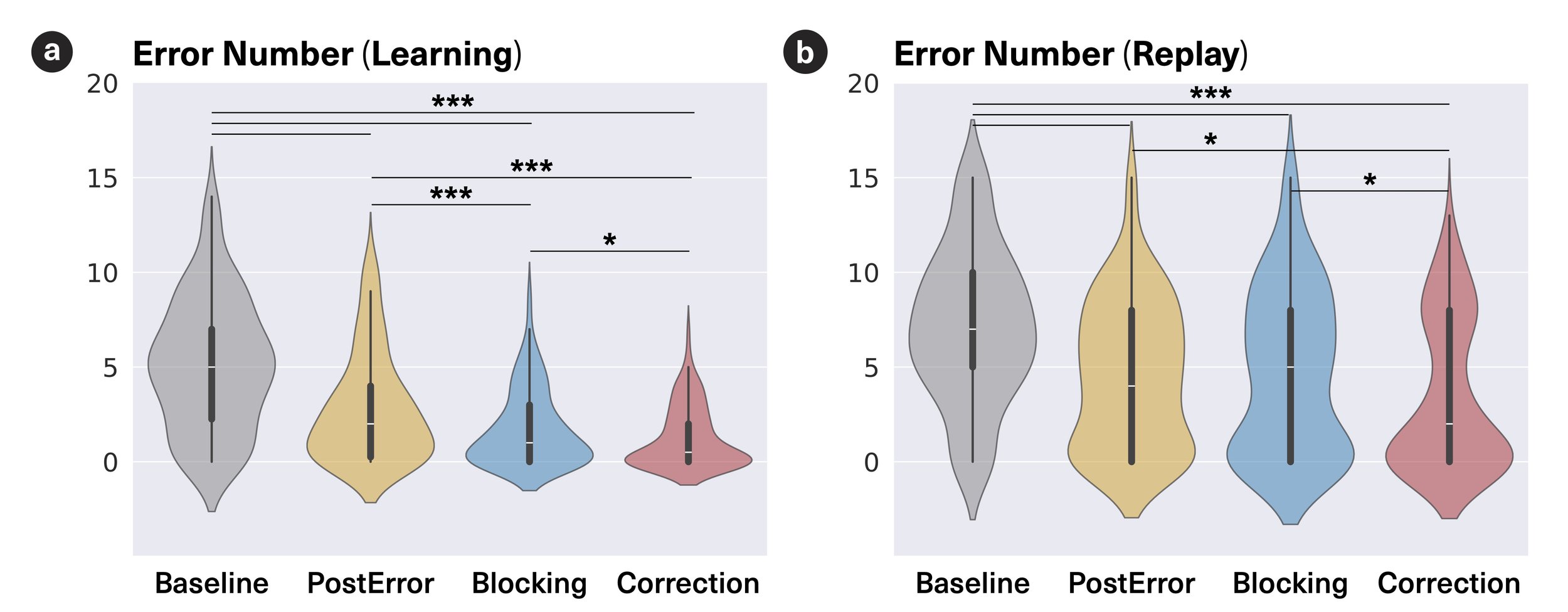
We conducted a user study comparing these strategies in terms of learning performance and subjective experiences, such as perceived performance and sense of agency, thereby demonstrating the benefits of Preemptive Error Correction and providing its design implications.
🏆 Best Paper Honorable Mention Award
Kyungyeon Lee, Jai Vaichalkar, Arnav Dadarya, Wooje Chang, Atsushi Kikumoto, and Jun Nishida. 2026. FIXical I/O: Exploring the Effects of Real-time Error Sensing and Physical Intervention on Finger-based Motor Sequence Learning. In Proceedings of the 2026 CHI Conference on Human Factors in Computing Systems (CHI '26). Association for Computing Machinery, New York, NY, USA, 1–20. https://doi.org/10.1145/3772318.3790432