

DigituSync ー
We engineered DigituSync, a passive-exoskeleton that physically links two hands together, enabling two users to adaptively transmit finger movements in real-time. It uses multiple four-bar linkages to transfer both motion and force, while still preserving congruent haptic feedback. Moreover, we implemented a variable-length linkage that allows adjusting the force transmission ratio between the two users and regulates the amount of intervention, which enables users to customize their learning experience.
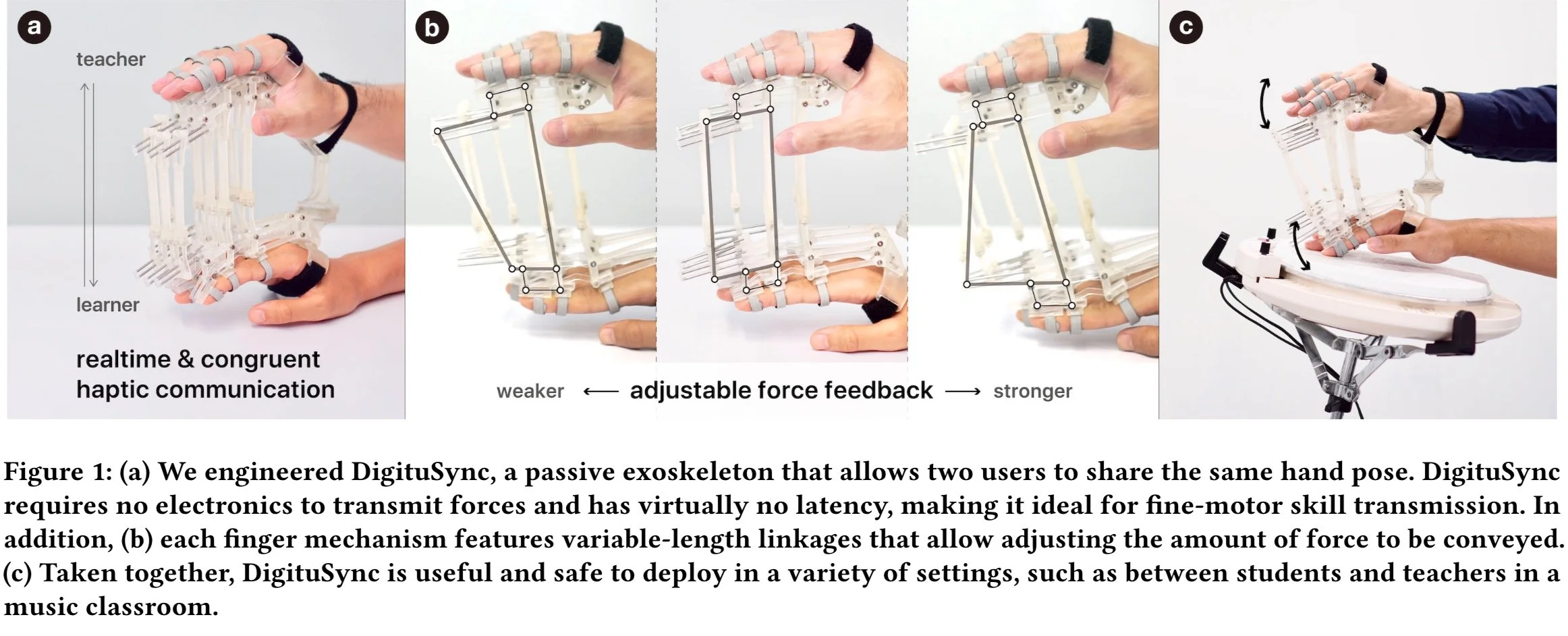
DigituSync's benefits emerge from its passive design: unlike existing haptic devices (motor-based exoskeletons or electrical muscle stimulation), DigituSync has virtually no latency and does not require batteries/electronics to transmit or adjust movements, making it useful and safe to deploy in many settings, such as between students and teachers in a classroom.

We validated DigituSync by means of technical evaluations and a user study, demonstrating that it instantly transfers finger motions and forces with the ability of adaptive force transmission, which allowed participants to feel more control over their own movements and to feel the teacher's intervention was more responsive. We also conducted two exploratory sessions with a music teacher and deaf-blind users, which allowed us to gather experiential insights from the teacher's side and explore DigituSync in applications.
Jun Nishida, Yudai Tanaka, Romain Nith, and Pedro Lopes. 2022. DigituSync: A Dual-User Passive Exoskeleton Glove That Adaptively Shares Hand Gestures. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology (UIST '22). Association for Computing Machinery, New York, NY, USA, Article 59, 1–12. https://doi.org/10.1145/3526113.3545630